MS Envision specialises in technical photography, GNSS surveying (RTK enabled), Geomatics, 3D modelling, visualisations, AVRs, Verified Photomontages and geospatial analysis services. Our expertise aids landscape architects, architects, planners and other professionals working in environmental impact assessment, development planning and consultation.
Established in 2000, our practice is leading technical photomontage work. Using full frame sensor DSLR cameras, the latest GNSS survey and laser scanning equipment and complex 3D modelling procedures, we provide valued technical and professional services to clients across the UK and overseas.








































































Mike delivered an excellent training session for LVIA photography at the recent LISW conference. Very useful!
Mike and his team undertook technical photography, surveying and 3D modelling to a high degree of accuracy for a very tall building proposal in Chiswick, London, with this work becoming key evidence at a major Public Inquiry. The resultant printed visualisations, which were produced at short notice, and the explanation of the technical methodology, were very high quality and provided the Inspector with confidence in the accuracy of the work undertaken, greatly aiding the Council's case.
I had the pleasure of working with Mike recently in the production of a Landscape and visual impact assessment and would have no hesitation in recommending him. His technical skills, accuracy and attention to detail used in the production of Photomontage work to predict views were of the highest order. This expertise is reflected in his authorship of guidance to this type of work, making him one of the best around.
Mike and his team gave a professional service in all aspects of technical photography for the Chiswick Curve Public Inquiry. Their approach to photography, surveying and 3D modelling gave everyone great confidence in the accuracy of the visualisations of the proposed Chiswick Curve tower block in views from the internationally sensitive Kew Gardens UNESCO World Heritage Site.
I just have to say that these visualisations look great. I am really pleased to have this technical level of visual support to our LVIA
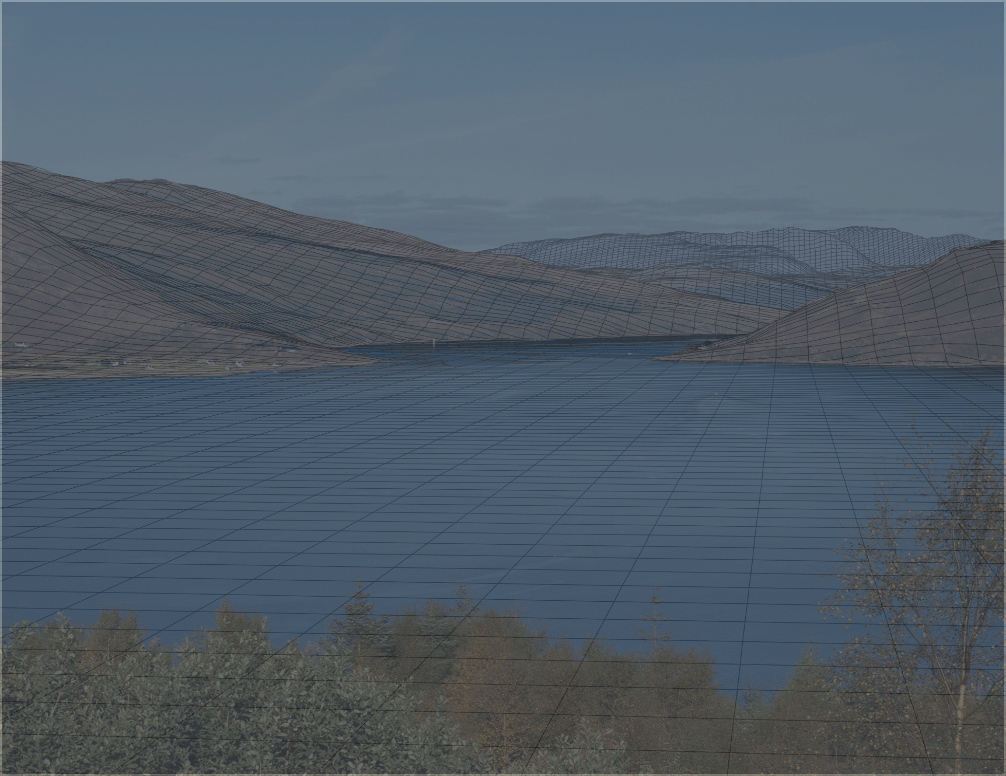
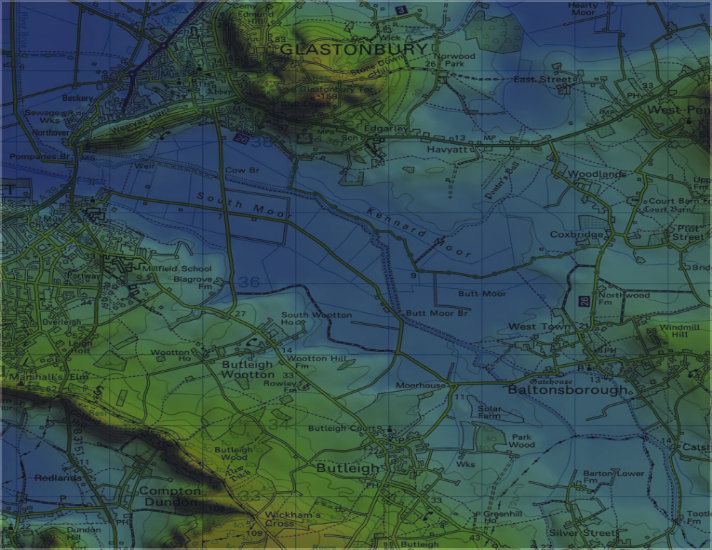
We were very impressed with the visualisations of our 50MW solar farm, as too were English Heritage and the planning authorities. Mike turned the photography and 3D modelling round at very short notice which helped keep the project on track. The visualisations also made a significant contribution to the success of our planning application.
The project team are all extremely pleased with the quality of the visualisation work MS Environmental has provided for this complex project, their advice and attention to detail has helped the project engage and consult with the public and regulators through pre-application.
MS Environmental provided a fast and efficient service, working closely with myself, the architect and client, to produce some excellent visualisations which have been instrumental in clearly communicating a highly detailed residential scheme with the public and planning officers.
That’s what I call a good service! Thanks again for all your help and advice, this is a great piece of work and an excellent output.